【www.zhuodaoren.com--模板】
无人机pos数据格式(一)
无人机pos数据转dxf
无人机pos数据转dxf
1、 pos数据(1*.txt格式)
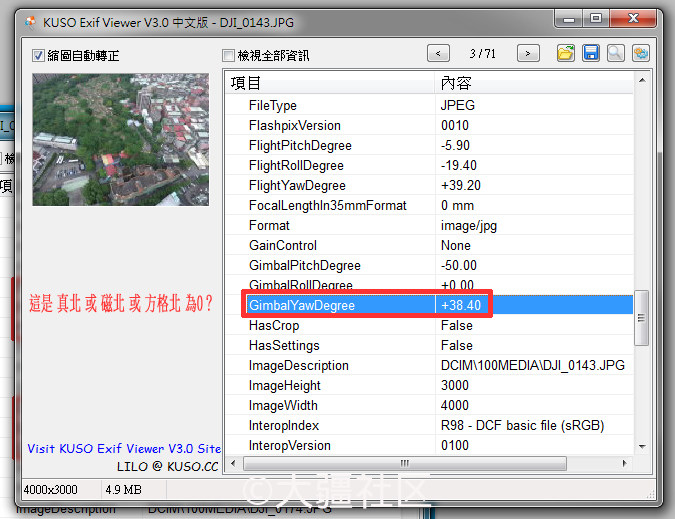
编号 相片日期和时间 纬度 经度 飞行高度 飞 行 姿 态 信 息
2、 使用Excel表格打开pos数据
① ②航向
③
3、 修改pos数据 ④完成。
保存为2*.txt 格式数据。
4、 使用打开2*.txt格式pos数据
① ② ③ ④
⑤
5、 CAD中修改dxf格式文件,调整字体大小,以便使用。⑥ 完成。
无人机pos数据格式(二)
photoscan无人机使用手册
【无人机pos数据格式】
photoscan无人机使用手册
PhotoScan在无人机航空摄影测量中的应用案例 随着航空摄影测量技术的飞速发展,利用低空无人飞机进行航空摄影获取遥感数据已成为现实。但由于无人机飞行姿态不稳定,所获取的影像存在旋片角大、畸变严重等现象。由于以上特点,利用传统的航空摄影测量数据处理软件处理无人机航摄数据时,工作量大,工作周期长。AgisoftPhotoScan软件是AGISOFT公司出品的3D扫描系统,在影像的快速拼接,DEM、DOM快速生成方面具有自己的优势。本文以青海省格尔木市夏日哈木镍钴矿区的无人机影像数据为资料,利用PhotoScan作为数据处理工具,就影像自动快速拼接、正射影像图(DOM)及三维地表模型(DSM)的生成方法进行了探讨与研究。 1 原始数据的特点及来源

利用无人机航空摄影获取影像数据,速度快,效率高,但无人机航测不同于传统的大飞机航测,因为它体积小,重量轻,姿态稳定性方面不如大飞机,在飞行过程中伴随自驾仪对其姿态的不断调整,有时会产生较大的旋片角。而且由于所搭载的相机毕竟不如专业大飞机航测所用的相机,其影像畸变也较为严重。不过随着科学技术的不断发展及处理无人机航测影像软件的技术不断改进,以上问题已经得到解决和验证。
本测区影像数据就是通过无人机航空摄影测量技术所获取的,其分辨率按设计要求为0.2米,设计航高为1100米,实施航飞共计四个架次,布设40条航线,总航程445.83公里,测区范围总面积达120平方公里(图1),获取原始照片数据2185张(图2)。
图1 图2
2 数据处理软件AgisoftPhotoScan的分析介绍
AgisoftPhotoScan是俄罗斯Agisoft公司研发的3D扫描软件,这是一款基于影像自动生成高质量三维模型的软件,它根据多视图三维重建技术,可以对任意照片进行处
理,小到考古摆件,大到大量航片数据处理,软件仅通过导入具有一定重叠率的数码影像,便可实现高质量的正射影像生成及三维模型重建,整个工作流程无论是影像定向还是三维模型重建过程都是完全自动化
我们将PhotoScan引入无人机航空摄影测量数据处理应用当中,结合夏日哈木矿区无人机航飞数据,实现了航测成果中DOM和DSM产品的生产(图3)。
图3
实践结果得出它可以创建高分辨率的带有真实地理参考的正射影像(使用控制点可达5cm精度)以及高质量带有详细彩色纹理的数字地表模型,并可以将成果转换到大地坐标或者工程坐标系中
3 数据生产流程
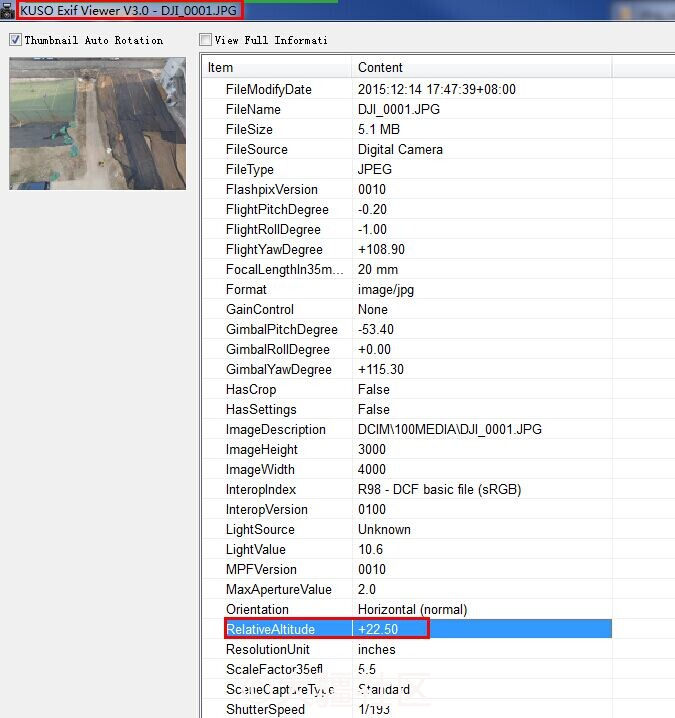
3.1原始数据预处理及作业设备 根据无人机的用途及种类的不同,无人机所获取的POS数据其文件格式也各有不同,
这里首先要将POS数据格式做一定的修改,让其能顺利导入软件PhotoScan当中去,其格式如图4。
在“地面控制”界面---导入pos数据,并且对其参数进行设置,如下图所示:
在“工具”中——打开“相机校准”——对相机的精度进行修正。【无人机pos数据格式】
像主点坐标,像元尺寸大小,相机焦距等参数输入(此处要修正,否则变形会较大)
像素尺寸 = 像元尺寸大小 ×4000;像元尺寸大小×3000;注意单位要是毫米。要一致。然后输入焦距长度。
无人精灵4畸变校正参数是:(这里可以输入接近值,因为在运算过程中,软件会自动更正的)
像元尺寸大小为1.58um;
焦距长度为3.61mm;
输入之后,像主点偏移量就会自动改正。界面为:
无人机pos数据格式(三)
photoscan无人机使用手册
photoscan无人机使用手册
PhotoScan在无人机航空摄影测量中的应用案例 随着航空摄影测量技术的飞速发展,利用低空无人飞机进行航空摄影获取遥感数据已成为现实。但由于无人机飞行姿态不稳定,所获取的影像存在旋片角大、畸变严重等现象。由于以上特点,利用传统的航空摄影测量数据处理软件处理无人机航摄数据时,工作量大,工作周期长。AgisoftPhotoScan软件是AGISOFT公司出品的3D扫描系统,在影像的快速拼接,DEM、DOM快速生成方面具有自己的优势。本文以青海省格尔木市夏日哈木镍钴矿区的无人机影像数据为资料,利用PhotoScan作为数据处理工具,就影像自动快速拼接、正射影像图(DOM)及三维地表模型(DSM)的生成方法进行了探讨与研究。 1 原始数据的特点及来源
利用无人机航空摄影获取影像数据,速度快,效率高,但无人机航测不同于传统的大飞机航测,因为它体积小,重量轻,姿态稳定性方面不如大飞机,在飞行过程中伴随自驾仪对其姿态的不断调整,有时会产生较大的旋片角。而且由于所搭载的相机毕竟不如专业大飞机航测所用的相机,其影像畸变也较为严重。不过随着科学技术的不断发展及处理无人机航测影像软件的技术不断改进,以上问题已经得到解决和验证。
本测区影像数据就是通过无人机航空摄影测量技术所获取的,其分辨率按设计要求为0.2米,设计航高为1100米,实施航飞共计四个架次,布设40条航线,总航程445.83公里,测区范围总面积达120平方公里(图1),获取原始照片数据2185张(图2)。
图1 图2
2 数据处理软件AgisoftPhotoScan的分析介绍
AgisoftPhotoScan是俄罗斯Agisoft公司研发的3D扫描软件,这是一款基于影像自动生成高质量三维模型的软件,它根据多视图三维重建技术,可以对任意照片进行处
理,小到考古摆件,大到大量航片数据处理,软件仅通过导入具有一定重叠率的数码影像,便可实现高质量的正射影像生成及三维模型重建,整个工作流程无论是影像定向还是三维模型重建过程都是完全自动化
我们将PhotoScan引入无人机航空摄影测量数据处理应用当中,结合夏日哈木矿区无人机航飞数据,实现了航测成果中DOM和DSM产品的生产(图3)。
图3
实践结果得出它可以创建高分辨率的带有真实地理参考的正射影像(使用控制点可达5cm精度)以及高质量带有详细彩色纹理的数字地表模型,并可以将成果转换到大地坐标或者工程坐标系中
3 数据生产流程
3.1原始数据预处理及作业设备 根据无人机的用途及种类的不同,无人机所获取的POS数据其文件格式也各有不同,
这里首先要将POS数据格式做一定的修改,让其能顺利导入软件PhotoScan当中去,其格式如图4。
在“地面控制”界面---导入pos数据,并且对其参数进行设置,如下图所示:【无人机pos数据格式】
在“工具”中——打开“相机校准”——对相机的精度进行修正。
像主点坐标,像元尺寸大小,相机焦距等参数输入(此处要修正,否则变形会较大)
像素尺寸 = 像元尺寸大小 ×4000;像元尺寸大小×3000;注意单位要是毫米。要一致。然后输入焦距长度。
无人精灵4畸变校正参数是:(这里可以输入接近值,因为在运算过程中,软件会自动更正的)
像元尺寸大小为1.58um;
焦距长度为3.61mm;
输入之后,像主点偏移量就会自动改正。界面为:
无人机pos数据格式(四)
Agisoft photoscan在无人机航空摄影影像数据处理中的应用
摘要: 根据航空摄影测量数据处理的实践与经验,对利用Agisoft photoscan软件进行无人机获取的影像数据进行处理,生成数字地表模型(DSM)和正射影像图(DOM)进行了探讨。 Abstract: According to the practice and experience of the management of aerial photography and survey data processing, this paper discussed the application of Agisoft photoscan in UAV image data processing and the production of digital surface model (DSM) and digital orthophoto map (DOM).
关键词: Agisoft photoscan;影像数据;建模;处理
Key words: Agisoft photoscan;image data;modeling;dispose
中图分类号:P237 文献标识码:A 文章编号:1006-4311(2013)20-0230-02
0 引言
随着航空摄影测量技术的飞速发展,利用低空无人飞机进行航空摄影获取遥感数据已成为现实。但由于无人机飞行姿态不稳定,所获取的影像存在旋片角大、畸变严重等现象。由于以上特点,利用传统的航空摄影测量数据处理软件处理无人机航摄数据时,工作量大,工作周期长。Agisoft photoscan软件是AGISOFT公司出品的3D扫描系统,在影像的快速拼接,DEM、DOM快速生成方面具有自己的优势。本文以青海省格尔木市夏日哈木镍钴矿区的无人机影像数据为资料,利用photoscan作为数据处理工具,就影像自动快速拼接、正射影像图(DOM)及三维地表模型(DSM)的生成方法进行了探讨与研究。
1 原始数据的特点及来源
利用无人机航空摄影获取影像数据,速度快,效率高,但无人机航测不同于传统的大飞机航测,因为它体积小,重量轻,姿态稳定性方面不如大飞机,在飞行过程中伴随自驾仪对其姿态的不断调整,有时会产生较大的旋片角。而且由于所搭载的相机毕竟不如专业大飞机航测所用的相机,其影像畸变也较为严重。不过随着科学技术的不断发展及处理无人机航测影像软件的技术不断改进,以上问题已经得到解决和验证。
本测区影像数据就是通过无人机航空摄影测量技术所获取的,其分辨率按设计要求为0.2米,设计航高为1100米,实施航飞共计四个架次,布设40条航线,总航程445.83公里,测区范围总面积达120平方公里(图1),获取原始照片数据2185张(图2)。
2 数据处理软件Agisoft photoscan的分析介绍
Agisoft photoscan是俄罗斯Agisoft公司研发的3D扫描软件,这是一款基于影像自动生成高质量三维模型的软件,它根据多视图三维重建技术,可以对任意照片进行处理,小到考古摆件,大到大量航片数据处理,软件仅通过导入具有一定重叠率的数码影像,便可实现高质量的正射影像生成及三维模型重建,整个工作流程无论是影像定向还是三维模型重建过程都是完全自动化。
我们将PhotoScan引入无人机航空摄影测量数据处理应用当中,结合夏日哈木矿区无人机航飞数据,实现了航测成果中DOM和DSM产品的生产(图3)。
实践结果得出它可以创建高分辨率的带有真实地理参考的正射影像(使用控制点可达5cm精度)以及高质量带有详细彩色纹理的数字地表模型,并可以将成果转换到大地坐标或者工程坐标系中。
3 数据生产流程(图3)
3.1 原始数据预处理及作业设备。根据无人机的用途及种类的不同,无人机所获取的POS数据其文件格式也各有不同,这里首先要将POS数据格式做一定的修改,让其能顺利导入软件PhotoScan当中去,其格式如图4。
3.2 导入影像。本测区面积较大,获取的影像数量较多,PhotoScan在处理这种大数据的任务时,依照航线图的布局将整个区域分成4个测区块进行处理,平均每个块导入500张左右照片数据,对每个块逐一进行点云提取和立体模型建立,最后再进行合并、提取纹理。通过这样的方法,一方面可以有效的利用计算机的性能特点,一方面可以提高数据处理的效率。导入的影像必须是依照航线且连续,中间不能有空洞(图5)。
3.3 数据定向、点云提取。Agisoft photoscan根据摄影测量的基本原理,根据最新的多视图三维重建技术,自动计算出照片的位置、姿态等,其内定向、相对定向及绝对定向都自动完成,无需人工另加干预。软件所需的基本数据只有影像、POS数据及控制点数据,影像的拍摄位置是由无人机在飞行过程中根据航线设计和飞行姿态所决定的。
经过修改好相应格式的POS数据和2185张照片数据分组导入PhotoScan中,自动定向及生成的点云数据
(图6)。
3.4 立体建模。传统测绘技术主要是单点精确测量,要用其采集数据进行三建模就存在很多问题,因为描述目标结构的完整属性需要采集大量的点,小则几万,多则几百万甚至几千万,这样才能把目标完成建模,在这里利用Agisoft photoscan就解决了这个问题,它能从无人机航拍的原始照片数据中提取带有坐标信息的点云数据,即快速重构出目标的三维模型即线、面、体、空间等各种数据,再现事物真实的形态特性,是继GPS技术以后又一项测绘技术新突破(图7)。
3.5 赋予纹理。建模完成后,接下来的工作就是给模型赋予材质,Agisoft photoscan可根据不同的要求,在打开的设置对话框中进行调整,达到我们所需要的效果。材质的最终来源及分辨率大小与我们所获取影像及质量有关(图8)。
3.6 成果输出。数字正射影像DOM及数字地表模型DSM的输出是在以上工作完成之后导出的,导出时可以调整分辨率大小、选择投影类型,导出时可以分幅及整幅图导出。导出格式通常为TIFF/GeoTIFF(*.tif),数字地表模型可导出为PDF或3DS等格式(图9、图10、图11)。
4 结语
本文从实际出发,以青海省格尔木市镍钴矿区利用无人机获取的影像数据为基础资料,经过灵活应用软件的技术特性,最后成功得出所需要的各项数据成果。结果表明,利用Agisoft photosca三维场景快速自动建模,快速生成正射影像图的方法是目前无人机应急测绘较好的数据处理技术平台,由于它是基于影像的,纹理数据可以从原始影像中提取,所以可以方便快捷地建立逼真的三维场景模型。它不仅可以应用到航空摄影测量当中,甚至可以延伸到建筑、考古、矿山、应急救灾等多种领域。这一技术的推广与应用必将有助于无人机航空摄影测量技术的进一步发展。
参考文献:
[1]王佩军,徐亚明.摄影测量学[M].武汉大学出版社,2005.
[2]郑顺义,王瑞瑞,陈长军,张祖勋.基于立体相机的三维场景建模[J].测绘通报,2008(02).
[3]陈玲,潘伯鸣,曹黎云.低空无人机航摄系统在四川地形测绘中的应用[J].城市勘测,2011(05).
无人机pos数据格式(五)
Inpho软件在风电工程无人机影像空三加密中的应用
[摘 要]摄影测量工作站Inpho高精度、高效率、高度自动化的特点使其在DLG、DOM及DEM生产制作中的优势得以体现,内业作业效率和产品质量显著提高。无人机航空摄影测量技术具有的高机动性、高分辨率、高度集成和低成本等特点,已经成熟应用于风能开发勘测上。本文以西南地区某一风电工程生产数字线画图为例,对Inpho软件空三加密的流程进行介绍,并对平差后的精度进行了分析,最后本次应用做了总结。 [关键词]Inpho; 空三加密 ; 风电场 ; 无人机影像
中图分类号:V279+.2 文献标识码:A 文章编号:1009-914X(2014)34-0235-02
1 概况
近年来,随着航测数据获取新技术的不断发展,尤其是带有POS系统的高分辨率、高精度数字航摄系统的不断成熟,以及无人机技术的快速发展,可为航测内业数字产品生产提供高精度的POS数据及高质量的影像数据等基础数据。为提高电力勘测设计质量、加快勘测设计进度,航空摄影测量技术作为一种勘测手段发挥了重要作用,目前已被广泛应用于电力行业勘测设计中。近年来,随着无人机航空摄影测量技术(以下简称无人机航测技术)的迅速发展,相对于常规摄影测量手段,无人机航测由于具有作业简便、高机动性及低成本等优势,正越来越多地应用于风电场的勘测设计工作中,尤其在西南地区,山地多、作业环境恶劣、风电场测区面积较小的特点,使用无人机航测技术获取区影像,更能凸显其特点。
2 Inpho空三加密流程
Inpho是欧洲著名的航空摄影测量与遥感处理软件,由斯图加特大学阿克曼教授创建于德国,1980~1990年提供空三和地形建模产品,1990~2000年成为数字摄影测量的组件供应商,提供地形自动化提取和自动化三角测量的产品。
MATCH�AT作为Inpho软件的空三加密模块,其连接点匹配算法是基于特征级和最小二乘匹配相结合的多级影像金字塔匹配算法,其高精度、高效率的匹配特征能够保证每张像片超过100个匹配的连接点,自动匹配有效连接点的功能强大,即使在沙漠森林等纹理比较弱的区域也可以很好地进行匹配,大大减少了人工参与度,提高工作效率。
以下是Inpho中进行无人机空三加密的流程:
2.1 工程设置
包括:相机文件设置;影像引入;GPS/IMU数据引入;像控点引入;设置航线等。
注意事项:①无人机影像需要做畸变校正,因此相机参数的填写应严格按照检校报告填写,尤其注意影像像素大小、相机焦距、主点偏移及相机畸变纠正参数的正确性(畸变校正也可在其它软件中进行,在Inpho中引入校正后的影像创建工程);②引入GPS/IMU数据及控制点数据时注意GPS/IMU数据和控制点的坐标系统要统一,数据ID和影像ID一致,并设置好各数据的标准差(通常可由软件自动算出);③测区平均高程设置的合理性在航线拼接质量及后续自动连接点的查找过程中起重要作用;④可根据实际飞行手动设置航线,也可使用程序根据GPS/IMU数据自动计算航线。
2.2 创建金字塔影像
影像必须做金字塔影像处理,以便后续显示及连接点匹配(一般建议建立内部金字塔),无人机获取的数据为真彩色影像,因此还需指定影像的RGB通道,生成色彩信息文件,方便后期对正射影像进行匀光匀色处理。
2.3 检查航线排列的正确性
本步操作在Point Measurement Tool中进行,主要是检查影像是否排列正确,平均高程是否设置合理等。
容易出现的问题及解决方案: ①航线内有断点,检查工程设置过程中自动或者手工生成航线时是否有漏片②影像不显示,检查是否已做金字塔影像或Preferences中"Display aerial images in main view"选项是否勾选③航线内影像排列反向,可以通过旋转相机进行调整④影像拼接质量差,调整测区平均高程的设置。
2.4 自动生成连接点
Match-AT中选择"Automatic tie point extraction with adjustment of block",设置好Edit中各参数,点击运行即可进行连接点的匹配工作。
容易出现的问题及解决方案: ①自由网平差值较大,检查连接点的正确性,将有错误的点或者误差较大的连接点删掉;②个别区域连接点较少或者出现空洞,这时可以在点较少的影像上手工添加几个连接点,重新进行自动连接点匹配。针对上述两个问题的另一个解决办法是:可以提取一个粗略的DTM用于初始化连接点匹配,或用上次平差后的POS数据更新工程中的POS数据,重新进行连接点匹配,二者结合效果更好。
2.5 控制点量测
控制点量测时,可以预先在测区四周量测几个控制点,进行一次区域网平差,再次进入点量测窗口,根据软件自动预测的点位添加余下的控制点了。
2.6 区域网平差
进入Match-AT模块,选择Postprocessing(adjustment only)进行区域网平差,根据区域网平差后各控制点的残差值进行点位微调、删除残差较大的点,直至各控制点的残差值满足测图精度要求,而后导入VirtuoZo中进行立体测图。
3 工程实例
3.1 数据获取
该实验风电场位于西南某一地区内,海拔分布在1855~2469米,平均海拔2250米,地形高差大,属于高山区。本次航摄设计飞行高度为2870米,沿东西向飞行,航向旁向设计重叠度分别为77%、55%,最低点地面分辨率为0.22米,最高点航向旁向重叠度分别为67%、35%,采用Canon 5D MarkII 相机作为航摄仪,相机焦距为24毫米,共飞行一个架次。
3.2 数据情况 数据经过畸变纠正、格式转换等预处理工作,共获取有效航片223张,
像幅大小为5616×3744像素(mm×mm),像元大小6.4微米;平均地面分辨率为0.18米,影像色彩均匀、清晰、颜色饱和,部分影像含有少量云影,但符合相关规范的要求。
3.3 空三加密及数字线画图生产
本次从野外共获得33个像控点,在Inpho中进行空三加密,平差后各控制点的结果中误差列表如下:
区域网平面位置中误差为0.254米,高程中误差为0.149米。
3.4 立体模型检查精度
将空三加密成果(外方位元素文件)导入适普测图软件中进行精度检查,主要通过以下两种方式,一种是检查控制点在单模型中的精度和在不同模型中的精度差异,一种是检查野外实测的检查点与模型的精度差异。通过检查发现,控制点在单个立体模型中贴合较好,平面和高程误差较小,且同一个控制点在不同立体模型中均贴合较好,模型差较小;同时,采集的野外检查点在平面及高程上跟模型差别较小,符合相关规范要求,能够满足大比例尺测图的精度。
4 总结
西南地区风电工程由于其特殊的地理环境,海拔高、植被茂密、道路交通条件差等情况,采用人工野外实测地形点成本高、耗时长,不能满足风电工程预可研阶段对地形资料的快速获取要求。利用无人机机动、快速航摄等特点,获取测区范围内的高分辨率影像,通过布设一定数量的像控点,结合Inpho软件的高精度、高效率空三加密计算,在航测数字测图系统中进行地形图测绘,并结合外业调绘数据、外业检测点数据进行地形图修测,高效提供了DLG数据产品,精度满足规范要求。
参考文献
[1] 胡海友 基于Inpho的空三加密及正射影像制作方法研究[J].铁道勘察,2013,(6):12-15.
[2] 刘伟,等.无人机航空摄影测量技术在风电场勘测设计中的应用[J].内蒙古电力技术,2013,31(2):75-79.
[3] 刘淑慧.无人机正射影像图的制作[D].
[4] 孙朝阳,等.无人机航空摄影测量技术在风能开发勘测方面的应用[J].电力勘测设计,2011,10(5):24-29.
[5] 沈清华.无人机低空遥感测绘作业流程及主要质量控制点[J].人民珠江,2011,(4):50-67.
本文来源:http://www.zhuodaoren.com/fanwen295170/
推荐访问:无人机pos系统 无人机pos文件